1������
�����С������¹ʺ����仯����ɵ������˻���������������ӣ�����������������˶������ϰ�ֱ��Ӱ�컼�ߵ�������������ͳ�������ֶ���Ҫ��������ҽʦ�������߹ؽڻ�Ⱥͼ���ѵ��������ѵ��Ч����ҽ�������ҵ��ˮƽ��ѵ��ʱ������ص�Ӱ�졣����кܶ��о����з�����صĿ���ѵ���豸��������ѵ�������»�ȡ֫����˶�����[1]��

���ڳ��ֵ��ֹ��ܿ����豸�Ǹ��Եģ���ն�����Զ�������ּ�����֯�������˵Ľ��������У������ֵ���Ӧ��Ƿ�ѣ���Ȼ�����������кͿ���ʵ�ְ�ȫ�������������Ѷȸߣ�ϵͳ�ɱ��ϸߣ��������ƹ�Ӧ�á�����������ֵ������е�ֳ�����úͷ��Ӹ������Բ��ϵ���˳�ԣ���������ԡ�ճ���Ժͳ������Ե����������˶��Ϳ�����DZ�ڵġ���е���ܡ����ã����Ϳ��Ƶĸ��Ӷȣ�ʵ�ָ�����ԡ�ǿ��Ӧ�Ժ����ý����ԣ���ҽ�ƿ�����������ҪӦ�ü�ֵ[2]��
���⣬�ٴ�ҽѧҲ�����������������뿵��ѵ����Ч��Ҫ�ȱ�������������Ŀǰ����-���ӿڣ�Brain-Computer Interface��BCI������Ϊ������������ѵ���ṩ��һ����;��������������ź����ⲿ�豸֮�俪����һ��ȫ�µ���Ϣ����ͨ���Ը��ƴ���Ƥ��Ŀ����Բ��ָ��������ܻ���沿�ֹ���[3]��ͨ������������ѵ���Ļ�����ϣ��ٽ����߸о��˶���·���ؽ���ʹ����������ѵ����Ϊ�Կ�ѧ������ҽѧ���������̡�����ѧ���������Ծ���о�����֮һ��
2���ֲ��˶���ͼʶ��
������˹������ѧDaly��ͨ���˶����������Ƥ����Ԫ�ļ������������BCIϵͳ����Ч�ظ��������շ��Թ������ܲ����ʹ���Ƥ����쳣������������˶���֪�ͱ����ⲿ�豸�����γ�����������ѵ��ϵͳ����������������֫����˶����ܿ���[4]����ʢ�ٴ�ѧBundy��ͨ�������ֲ������˶���ͼ�������߿����������е�֣�ʵ���˻������ճ�������ִ�п���ѵ��[5]����ͼ3(a)��ʾ������������ѵ��ϵͳ�����ܸ������������߿���ѵ���������ڻ��ߵĿ���ѵ����Ҳȡ����һ���Ľ�չ���¹�ͼ������ѧV��rkutiB��ͨ���˶��������MIT-MANUS�����˸���������ִ֫�п���ѵ�������������֫�˶����ܵõ����Ը���[6]����ͼ3(b)��ʾ����ѧ���������Ŷ�ͨ��������ؽ���-���˶�������ơ���һ�š����������˸�����ؽڵĿ����˶�����ǿ�˿���ѵ��Ч����������ͨ��ѧ��⻪�����Ŷ��о���Ŀ���յ����˶�����̼���ʽ��֤������Ŀ�굼����˶�������ǿ�˶Դ���Ƥ��ļ�������˶����������[7]��Τ��������ѧWhyte�Ƚ�һ������˹淶����ѵ����ϵ�ɰ��������������뿵��ѵ��[8]��

Ϊ������˶�������������Ҫ�Ŀ���֫���ֱ������ԣ���������������ֲ���-�ն���ֱ����ص��˶�����Ͷ����۲����ϵĸ��Ϸ�ʽʵ�飬��ʵ�ָ��õ��ֲ������������˶���������������ȥ����ijһ�����������ò����κμ������������������������Ϸ���ģ�������Ӧ�����������۲����������߹ۿ��ճ������ֵĻ�����������Ĩ���ӡ�ϴ�·�����Ƶ��������Ȼ����ȥģ����Ƶ�������ֵĶ�����ͨ��ERSP��ʱ��������Ŷ������Ե���ͼ���Թ�����������������-�ն����˶�����Ͷ����۲�Դ���Ƥ��ļ�����ɡ�

ʵ������������-�ն���ֱ����ص��˶�����Ͷ����۲����ϵĸ��Ϸ�ʽ����ǿ������-�ն���ֱ����ش���Ƥ��ļ���̶ȣ������ˡ��쿪��������Ӧ�����ͼ�����������ڡ���ȭ�����������˶�����Ͷ����۲����Ͽ���ǿ�Դ���Ƥ��ļ���̶ȣ��������ֲ��˶������ϰ��Ļָ������ҽ�ʵ���в�ͬ��ʽ����-�ն����Դ���Ƥ��ļ������Ϊ�������������С���任���ռ�ģʽ��ȡ��-�ն���EEG�������㷨����ͨ�������б��������-�ն�����ϸ��ͼ����ʶ��[9]��
ͼ7 С���任���ռ�ģʽ�㷨��������ͼ
3�����念�������������
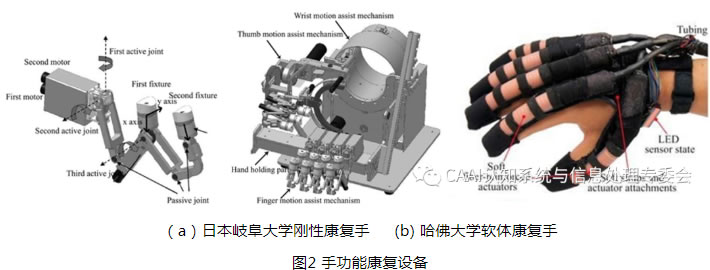
���е����念���ִ���������������Һѹ��������ѹ��������������ѧ��HyunKi In����[10]�������ͼ8��a����ʾ��һ���������������念����Exo-Glove��������֯������ָ���ֱ�������Ʋ��������Խ���˿����������������Խ���˿�����ɸ�����ָ�������������չ������ָ������Ϊ20N����������Ϊ40N����������ϵͳ�����ױ������ʹ������196g��������ץ��ֱ��76mm�����塣�����ѧ��Panagiotis����[11]�������ͼ8��b����ʾ��һ������Ϊ285g�ĸ�������ץ�յ�Һѹ���������念���֣����䱸��һ������Ϊ3.3kg��Һѹ�������Ʊ�Яʽ��������Һѹ���念���ֵ�����������������ά��ǿ���������ij��͵���ǻ��Լ���ߡ����Ʋ��������������ѹʱ�����������Ťת���쳤���˶������Ը�����ָ������������˶��ͱ�����չ�˶��������ѧ��Stacey Lyne����[12]����3D��ӡģ�߽��������Ͻ������������������������Ӷ���������ͼ8��c����ʾ������ԼΪ160g�� PneuNet ���念���֡������������������ڿ����ֱ���Ƕ�뵯��ģ��������Ʋ㣬ʹ������ǻ����ѹʱ����ģ�ʹ��һ��������ʵ�ָ�����ָ���������˶�����ѹΪ0.45Mpaʱָ��ѹ��Ϊ1.2N��

��������ʽ���念���ֵ���������ϵͳ�ϸ��ӡ����ֵ�ѹ�ȸн�ǿ��Һѹ���念���������ϴ���й¶��Ⱦ�ķ��գ�����������������ᡢ�ɱ����͡��������ƽ�Ϊ���������念����չ�����о���ǰ�ڣ����������������Ʋ����άԼ���ĵ���ǻ�������ṹ��ƣ������ڵ��ݱ仯ԭ�����ý�絯�Բ����������Դ��������������ͼ9��a����ʾ�ļ������Դ��������������念���֣��ı����Ʋ㷽���Ը������ֱַ�ʵ��������չ�����������˶����������ָ�����ǶȽ��п���Ч������[13]�����Ǹ��������念��������������ʵ��Ĵָ������/��չ�˶���Ҳ��ͬʱʵ����չ/�����˶���˫������ѵ����Ϊ�ˣ��������������ò��ƹ�������������ѹ��������������ͼ9��b����ʾ���������念���֡����������念���ֽ���149�ˣ����ÿ���ʽ���ף�ͨ��Ƿ�������Ը�����ָʵ����չ/�����˶���Ĵָ������/��չ�˶�������ѵ�������ı�Яʽ���������С�������ᣬ��������������ɵ������������·��ѹ����������ʵ���������չ/��������������չʱ�����������Ϊ4.6N������/��չ������������ʱ���������Ϊ8.1N����ǰ�����������念���ֵ���������ơ�����������ڲ��ϵؽ����Ż���

4���ֲ�����������ѵ��ϵͳ���
�����ֲ�������ѵ���Ŀ��������ڿ��������˶���ͼʶ���Ի��ӿڡ������ֵȷ�����о������������һ�ֿɿ���ѵ�����ճ�������Ĵ���ʽ����������ѵ��ϵͳ��ϵͳ����Ҫ���ܰ������ʽ�̼�����ϸ��ͼ��֪����ģʽ��ͼʶ���[14]��

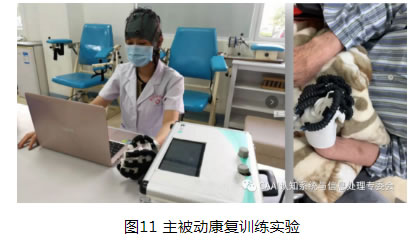
�ֲ�������ѵ��ϵͳ�ɷ�Ϊ���������ͱ��������������֡�����������ѵ���У����ڻ���������ͼ�ĸ�֪�����֣�һ�����ڶʽ�̼�����Ƥ��Ļ����ϣ�����ǿ��EEG ��ֱ����ȡ�����ֲ���-�ն�����ϸ��ͼ��EEG ������ʵ�ֶ��������ֲ������ľ�ϸ��ͼ��֪����һ���Ƿ��Ӳ�ͬģʽ��EEG���۵�ͼ(Electrooculogram��EOG)�ͼ���ͼ(Electromyogram, EMG)ģʽ�����ƣ�������ģʽЭͬ���Ʋ����Բ�������Ŀ���ָ��ڱ�������ѵ���У�ͨ�������˶���ͼ�����Ŀ���ָ���ֱ������ָ������念���ֽ����������ƣ�ʵ�����念���ָ����ֲ�ִ�п���ѵ��������ճ����ʵ����֤��ϵͳ�����������߱�������ѵ����ͨ���������������߿��ƿ�����е�ָ���ִ����-�ն�������ƽ����ȷ�ʴﵽ92.71%��������������������ѵ����Ҫ��Ҳ����������������ϵͳ��ʵ�û�ˮƽ��ͬʱ�����ֲ�����������ѵ��ϵͳ�ɹ��ڶ��ҽԺ��������ҵ���п������á�
�ο����ף�
[1] De V, Mulder T. Motor imagery and stroke rehabilitation: a criticaldiscussion[J]. Journal of Rehabilitation Medicine, 2007, 39(1):5�C13.
[2] �Ž�������躣�������ȣ������е���о�����[J]����е����ѧ����2017��53(13)��19-28��
[3] Schwartz A B. Cortical neural prosthetics[J]. Annual Review ofNeuroscience, 2004, 27(27):487�C507.
[4] Daly J, Wolpaw J. Brain-computer interfaces in neurologicalrehabilitation[J]. Lancet Neurology, 2008, 7(11):1032�C1043.
[5] Bundy D, Souders L, Baranyai K, et al. Contralesional brain�Ccomputerinterface control of a powered exoskeleton for motor recovery in chronic strokesurvivors[J]. Stroke, 2017, 48(7):1908�C1915.
[6] V��rkuti B, Guan C, Pan Y, et al. Resting state changes in functionalconnectivity correlate with movement recovery for BCI and robot-assistedupper-extremity training after stroke[J]. Neurorehabilitation and NeuralRepair, 2013, 27(1):53�C62.
[7] Li L, Jing W, Xu G, et al. The study of object-oriented motor imagerybased on EEG suppression[J]. Plos One, 2015, 10(12):e0144256.
[8] Whyte J, Dijkers MP, Hart T, et al. The importance of voluntarybehavior in rehabilitation treatment and outcomes[J]. Archives of physicalmedicine and rehabilitation, 2019, 100(1):156�C163.
[9] Zhang J, Wang B, Li T, et al. Non-invasive decodingof hand movements from electroencephalography based on a hierarchical linearregression model[J]. Review of Scientific Instruments, 2018, 89(8):084303.
[10]In H, Kang B B, Sin M K, et al.Exo-Glove: A Wearable Robot for the Hand with a Soft Tendon Routing System[J].IEEE Robotics & Automation Magazine, 2015, 22(1):97-105.
[11]Polygerinos P, Wang Z, GallowayK, et al. Soft robotic glove for combined assistance and at-homerehabilitation[J]. Robotics & Autonomous Systems, 2015, 73(C):135-143.
[12]Towards a soft pneumatic glovefor hand rehabilitation[C]// 2013 IEEE/RSJ International Conference onIntelligent Robots and Systems. IEEE, 2014.
[13]Jinhua Zhang, Hao Wang, Jiaqing Tang, Huaxia Guo, Jun Hong. Modelingand design of a soft pneumatic finger for hand rehabilitation[C] IEEEInternational Conference on Information and Automation. IEEE, 2015: 2460 �C2465.
[14] Zhang J, Wang B, Zhang C, et al. An EEG/EMG/EOG based multimodalhuman-machine interface to real-time control of a soft robot hand[J]. Frontiersin Neurorobotics, 2019, 13:7.
���ܿͷ�ϵͳ���˻���ϵķ�����ʽ�������ά���ܽ�ͽ�����з������������ܿͷ�ϵͳ�е�Ӧ�ó�����������з����㷨ģ�͵�ԭ����ʵ�����ʹ�÷�ʽ��Ч������
AI�˹����ܼ�����Ҫ����ǿ������IT������ʩ,�˹����ܵĹ�����Ҫ�ɲɼ�������ѵ���������IJ�����ɣ�ÿ��������Ҫ��д��ͬ���͵����ݣ���������Ҳ������ͬ�������洢�豸�����ϴ����ս��
�����ݶȷ��������������磨SNN��ѵ������������������ѵ�������£�SNN�ܹ��ڱ�����Ԫ�ڲ�����ѧ��ͬʱ��ýϺõ�����
Cartographer��ƽ̨�ʹ���������,MC2SLAMʵʱ������̼�ϵͳ,LeGO-LOAM���������͵����Ż��ļ����״���̼ƺͽ�ͼ����,SUMA++��Դ�Ļ���������Ϣ�ļ����״�SLAMϵͳ
�˹�����Ϊʲô���������������������Ŀǰ����������������ķ�������Щ���ѵ����ģ�������ר����ô˵
2022��ӭ����������ҵ���ű�ѡ����ɽ�ס�竞博JBO中心���ܡ����ſƼ������ݰ��ס����ݿ����ߡ����մ����ס��������ܡ������������Ƽ��Ƽ����ϴ���ӡ��Ի��ǿա�ͫ������
���ܿͷ�ϵͳ���˻���ϵķ�����ʽ�������ά���ܽ�ͽ�����з������������ܿͷ�ϵͳ�е�Ӧ�ó�����������з����㷨ģ�͵�ԭ����ʵ�����ʹ�÷�ʽ��Ч������
5��19�����磬 ��������Ȧ�Ļ����κ������˳������ �ߡ�5��19���й������գ��ൺ������ ���ൺ���ʻ������ľ��С�
�ൺ����̨��Ϋ�������������� �����Ļ������ξ־ֳ���ͬ����������ǩ�� ����������Ȧ�Ļ����� һ�廯��������չ�������Э�顷
ǿ���ٴ��ƽ��������γ��¸�֣��ӿ��γ��������¸�֣��ƶ�����������������չ
�����˸������¹����У�ʹ��һ�ֶഫ������Ϣ�ںϵ��������ʵʱ�ٷ�����ʹ�����˼ȿ��Ի���������Ϣ�Զ��ı��˶��켣�Ӷ���֤�û���ȫ���ֿ�����ɴ�������
5��17��,�Ĵ����ȷ����»����������²�ҵ���·�չ�ж��ƻ����������Ĵ������¡���ҵ����ҵ������ǩԼ��ʽ�͡��Ĵ�ʡ���־����о�Ժ5G����Ӧ�����ġ��ƽ�����ʽ
������ȫ����� ����ʱ�� �������Ϣ�Ƽ� �ȶ��Ƽ� ������� ������ŵ �������� �������Ļ� ƽ���ƿƼ� ���Ϲ�� ������ʵ ��Զ��Ѷ ������Ϣ
5��17�գ�������ʽ����5Gʱ��,������������5G������Ƭ���ǿ�ͨ��ʽ�߸߷���̳���У�ͨ����5G����ͨ�Ų����»�������
5��17�����磬������������5G������Ƭ���ǿ�ͨ��ʽ�߸߷���̳����ƽ�ڷ羰���㳡���У���Ҳ��ʽ�������п�ʼ��̤��5Gʱ����
�������ܵ���Ч��������ȫ�����Զ����������������ƽ̨�������������Ρ������ҵЧ�ʵı�����չ���Dz�ҵ��������ʱ������ʮ���У�����ĵ�������չ����
5��15���������������վ̨�����ٶ�ֱ�����ٶȹɼ�Ӧ������,��1000���û�Χ��
2022��ӭ����������ҵ���ű�ѡ����ɽ�ס�竞博JBO中心���ܡ����ſƼ������ݰ��ס����ݿ����ߡ����մ����ס��������ܡ������������Ƽ��Ƽ����ϴ���ӡ��Ի��ǿա�ͫ������
ɽ�������˹�˾,竞博JBO中心�������ٻ�ɽ��ʡ�������˹���������������ijƺ�,���й����Ų��˹����ܲ�ҵ�����ص�����Ұ���ʤ��λ
��������������Щ���ƣ�δ����չ����
��ͥ�㻤���������ڼ�����ذ�ȫ�㻤�����˻��������������ý�����ּ۸��ѯ��
��ͯ�㻤�������뺢�ӻ��������ˣѧϰ�۸���ѯ�ȹ���˵��ʹ��ָ�Ͻ���
չ�����ܻ����˿ɽ���������������������ѯ�����۸���ѯ�ȹ��ܽ����Լ�����չ������
���ܽ�����������ڽ��Ž�����ʾ��ѯ�����ƶ������۸���ѯ�ȹ���˵������
���ܽӴ�������ӭ������������ѯ���ɼ۸��ѯ
�������ֻ����˲������������ĵ������Ტ����˴��ĽӴ������Ŷ����غ��ܻ�ӭ
�������ܻ������ܰ����̼������ͻ���·ָ�������۸��ѯ
4s�����ܻ�����ӭ�����۵��������ռ������۸���ѯ��
չ�����ܻ����˿����ڽӴ�������ѯ�����۸��ѯ�ȹ���




